速度を変えながら効率よく歩くのに重要な神経回路は?
東北大学は1月22日、反射制御と呼ばれるヒトの神経系に基づいた制御に着目し、ヒトを模した筋骨格モデルを用いたシミュレーションによって、速度可変な歩行を再現することに成功したと発表した。この研究は、同大大学院工学研究科の古関駿介大学院生、林部充宏教授、大脇大准教授の研究グループによるもの。研究成果は、「PLoS Computational Biology」に掲載されている。
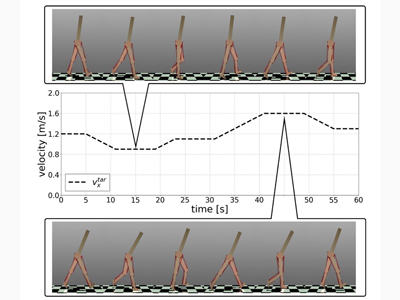
画像はリリースより
(詳細は▼関連リンクからご確認ください)
ヒトは、ときにはゆっくり、ときには早く、広範な速度域を網羅し、効率よく歩くことができる。しかしながら、このような広範な速度域の省エネ歩行を生成するメカニズムについては、十分に理解されていない。この課題を解決するための有効なアプローチの1つは、ヒトの歩行を「創る(再現する)」ことによってそのメカニズムを理解することである。実世界を近似し再現することが可能な物理シミュレーションや実世界のロボットを用いて、どのような運動が再現されたかを解析する構成論的アプローチによって、ヒトの歩行生成メカニズムを探ることができる。
研究グループは今回の研究で、ヒトの歩行生成に重要な役割を果たす反射制御と呼ばれる神経系に基づいた制御に着目し、シミュレーション上でヒトを模した筋骨格モデルを用いて歩行を再現することによって、広範な速度域の省エネな歩行に重要な神経回路を明らかにすることを目指した。
最小二乗法を拡張した最適化アルゴリズム「PWLS」を開発し、神経回路モデルを構築
これまでに、ヒトを模した筋骨格モデルを用いて、自然な歩行を再現できる反射制御の枠組みが提案されている。しかし、従来の反射制御の枠組みでは、再現される歩行の速度は一定であり、目標速度に従って正確に歩行速度を変えることができないという課題があった。そこで、広範な速度域の歩行を実現する神経メカニズムを明らかにするために、入力される目標速度に応じて歩行速度を調整できる反射制御の拡張を行った。
さらに、より省エネな歩行を再現する神経回路モデルを構築するために、最小二乗法(least square method)を拡張したperformance-weighted least square method (PWLS)という新たな最適化アルゴリズムを開発した。最小二乗法では、データとの二乗和誤差が最小となる曲線を求める。一方、研究グループが開発したPWLSでは各データ点に重み(評価値)を定義することで、その評価値を考慮した重み付き二乗和誤差が最小となるような曲線を求める。提案手法を用いて、エネルギー効率のよい歩行を生成したデータの評価が高くなるよう、各データ点に重みを与えて関数を求めることによって、より省エネな歩行を生成する神経回路モデルを構築することが可能となる。
遊脚の振りを促進・抑制する筋肉を制御する神経回路が重要因子と判明
構築した神経回路モデルを用いて、反射制御による広範な速度域の省エネ歩行を再現した。再現された効率のよい歩行と効率の悪い歩行を比較した結果、遊脚の前方への振りを促進する大腰筋に関する反射回路、遊脚の前方への振りを抑える大腰筋とハムストリングが協調する反射回路の2つの神経回路が、広範な速度域における省エネな歩行に寄与する神経回路であることを明らかになった。
義足やパワードスーツの制御への工学的応用に期待
今回の研究成果は、次の3点にまとめることができる。1.従来の反射制御の枠組みを正確な速度制御ができるよう拡張したこと、2.各データ点への重み(評価値)を定義することによって、より適応的にデータに最も適合する関数の導出が可能となる、最小二乗法を拡張した最適化アルゴリズムPWLSを提案こと、3.反射制御において広範な速度域の省エネ歩行に寄与する2つの神経回路を特定したこと、である。
「研究で提案した、広範な速度域の省エネ歩行を再現することができる反射制御の枠組みは、ヒトの歩行生成において重要な役割を果たす反射メカニズムに関する将来の研究に大きく貢献できることが期待される。さらに、生物の制御を模倣した、広範な速度域を省エネで歩くことができる二足歩行ロボット、より適応的に歩行や動作をサポートすることができる義足やパワードスーツへの制御への工学的応用が期待される」と、研究グループは述べている。
▼関連リンク
・東北大学 プレスリリース