見た目以外でヒトに「かわいい」と感じてもらうために重要な要素は?
大阪大学は10月16日、見た目の似ている対象が複数存在するとき、その対象の間でつながりを感じられる状況において、より「かわいい」と感じられることを、写真および動画を用いて明らかにしたと発表した。この研究は、同大大学院人間科学研究科の入戸野宏教授、ATRインタラクション科学研究所エージェントインタラクションデザイン研究室の塩見 昌裕室長らの共同研究グループによるもの。研究成果は、「PLOS ONE」オンラインに掲載されている。
画像はリリースより
(詳細は▼関連リンクからご確認ください)
「かわいい」という感情は、ヒトとヒト、ヒトとモノの交流を促す。近年普及が進んでいるペットロボットも、その多くが愛くるしく、かわいらしい見た目が採用されている。しかし、身体に比べて大きな頭、丸みを帯びた顔や体形、前方に突き出た広い額といった乳幼児の特徴(ベビースキーマ)に代表されるような、見た目の要素だけでかわいいと感じられる程度が決まるのかなど、ヒトにかわいいと感じてもらうために重要な要素は不明だった。
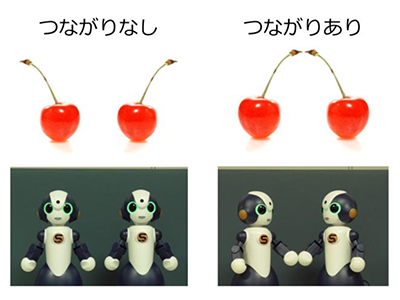
研究グループは、かわいいと感じられる見た目以外の要素を探索する中で、数と関係性の効果に着目した。例えば、1粒で置かれているサクランボよりも、2粒のサクランボが房でつながって置かれている方が、かわいいと感じられる。同様に、動物の赤ちゃんが1匹でいる場合よりも、複数の動物の赤ちゃんが楽しそうにじゃれている様子の方が、かわいいと感じると推察できる。これらのことから、研究グループは「複数の対象につながりがある」ように見えると、ヒトはその対象をよりかわいいと感じるという仮説を立てた。
静止画でも動画でも「2つの対象がつながりをもっている姿」をかわいいと感じていた
この仮説を検証するため、3つの実験を行った。実験1では、女の子・男の子・サクランボ・ロボットが、それぞれ単体の場合、2つがただ並んでいる場合、2つがつながりを感じさせるように並んでいる場合の画像を用意し、どのくらいかわいいと思うかをWEBアンケートで評価した。実験には201人の被験者(女性99人、男性101人、無回答1人、年齢は20~60歳代)が参加し、データに不備のない162人のデータを分析した。その結果、どの対象においても「2つがつながりを感じさせるように並んでいる」場合の方が、それ以外よりも、かわいいと感じられることが示された。
実験2では、ロボットが手を振って挨拶する様子の動画を、1台の場合、2台がただ並んでいる場合、2台がつながりを感じさせるように並んでいる場合で作成し、どのくらいかわいいと思うかをWEBアンケートで評価した。実験には202人の被験者(女性100人、男性100人、無回答2人、年齢は20~60歳代)が参加し、データに不備のない179人のデータを分析した。その結果、動画であっても、2つがつながりを感じさせるように並んでいるときの方が、それ以外よりも、かわいいと感じられることが示された。
つながりを感じさせるロボットの動画1~10台で検証、最もかわいく感じるのは「2台」
実験3では、つながりを感じさせるロボットの台数を1台から10台まで変化させて検証を行った。2つ目の実験と同様に、ロボットが手を振ってあいさつする様子の動画を用いて、どのくらいかわいいと思うかをWEBアンケートで評価した。実験には200人の被験者(女性98人、男性102人、年齢は20~60歳代)が参加し、データに不備のない152人のデータを分析した。その結果、2台のときが最もかわいいと感じられることが示された。
複数で活動するロボットの振る舞い設計に貢献する可能性
今回の研究成果は、ロボットという人工物であっても、複数台による関係性の表出を行うことで、よりかわいいと感じてもらえることを示している。「工業製品であるロボットは、個体の見た目を工夫することでかわいさを高めることには限界がある。しかし、同じものを量産できるというメリットを生かし、他のロボットと連携させることで、よりかわいく親しみやすく感じられるようになるという今回の知見は、今後、社会にロボットを普及させていくときの一つの方向性を示している」と、研究グループは述べている。
▼関連リンク
・大阪大学 ResOU