リアルハプティクス技術を応用した脊椎手術用ドリルを開発、有用性を検証
慶應義塾大学は3月13日、リアルハプティクス技術を応用した脊椎手術用ドリルを開発し、その有用性を実証したと発表した。この研究は、同大医学部整形外科学教室の中村雅也教授、八木満専任講師、山之内健人助教らの研究グループと、神奈川県立産業技術総合研究所の大西公平研究顧問(慶應義塾大学新川崎先端研究教育連携スクエア特任教授)、下野誠通グループリーダー(横浜国立大学工学研究院准教授)、日本メドトロニック株式会社、モーションリブ株式会社の共同研究によるもの。研究成果は、「Scientific Reports」に掲載されている。
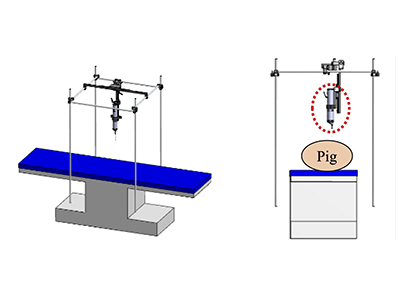
画像はリリースより
(詳細は▼関連リンクからご確認ください)
リアルハプティクスとは、人間がロボットを操作して現実の物体に接触した際の力や動きをデータ化し、リアルタイムで双方向に伝送することで、感触を再現する技術。動作や感触をデータ化することで、力触覚機能を機械に実装し、力加減を調整したり、力触覚を長距離伝達したりすることが可能となる。医学分野のみならず、産業分野のいわゆる「職人技」など、人手による感触を重視する作業において、リアルハプティクスの応用が進んでいる。
整形外科疾患の中でも脊椎領域の手術では、脊髄神経や脈管系の近くで骨ドリルを使用する。傷つきやすい組織の周辺で硬い組織を削掘するという手技の性質上、極めて難易度の高い操作で、手術者には極度のストレス下で正確な作業が求められる。
研究グループは、骨ドリルにリアルハプティクス技術を実装することで、従来よりも安全性の高い手術方法を確立することができると考え、研究を開始。骨ドリルにリアルハプティクス技術を実装した「ハプティックドリル」を開発し、経験の浅い外科医でも正確に安全な手術が可能なのか、脊椎手術で有用性を検証した。
椎弓の貫通に要する時間、貫通から停止までに進む距離は通常ドリルの約10分の1以下
研究では、3人の脊椎外科医がリアルハプティクス搭載骨ドリル(以下、ハプティックドリル)を操作してミニブタの椎弓(脊椎)を削り、椎骨の直下にある脊髄の近くまで貫通させ、ドリル先端の貫通検知までに要する時間や、貫通後にドリル先端が進行した距離をリアルハプティクス機能のないドリル(以下、通常型骨ドリル)と比較検証した。
その結果、椎弓の貫通検知に要する時間はハプティックドリルで0.015±0.001秒、通常型骨ドリルで0.17±0.04秒で、ハプティックドリルで有意に短時間だった(p<0.001)。また、貫通を検知してからドリルが停止するまでにドリル先端が垂直方向に進んだ距離は、ハプティックドリルで0.12±0.096mm、通常型骨ドリルで2.98±1.24mmであり、ハプティックドリルで有意に短距離だった(p<0.001)。 これらのことから、ハプティックドリルを使用した際に椎弓の貫通検知に要する時間、貫通検知から停止までにドリルが進む距離は、ともに通常型骨ドリルの約10分の1以下であることが明らかになった。
ハプティックドリルの使用で、経験の浅い外科医でも正確に安全な手術が行える可能性
また、ハプティックドリルを操作した脊椎外科医間で貫通検知に要する時間、停止までにドリルが進む時間には有意差はなく、経験の浅い外科医でも正確に操作することが可能と考えられることから、ハプティックドリルを使用することで、誰でも正確に安全な手術が可能となることが、客観的に検証できたとしている。
力触覚データの蓄積・活用で、遠隔ロボット手術や手術シミュレータ開発にも応用可
今後はハプティックドリルによる安全性の向上のみならず、力触覚に関するデータを蓄積・活用することで、遠隔でのロボット手術や手術シミュレータの開発にも役立つと考えられると、研究グループは述べている。
▼関連リンク
・慶應義塾大学 プレスリリース