内視鏡手術中に視覚的に血管を検出できないケースに対応
金沢大学は2月18日、腫瘍内にある血管を感知できるグリッパーを開発したと発表した。これは同大設計製造技術研究所の米山猛教授、理工研究域フロンティア工学系の渡辺哲陽教授および医薬保健研究域医学系の中田光俊教授らの研究グループによるもの。研究成果は、国際学術誌「Sensors」のオンライン版に掲載されている。
画像はリリースより
さまざまな病気の治療で行われている内視鏡を用いた手術は、患者の身体的負担が少ないという大きなメリットがある一方、手術空間が狭く、術者の視界が限られるという問題がある。特に、神経内視鏡で脳を手術する場合などは、血管を傷付けると視野が血液で覆われるため、止血が必須となり、そのための時間や労力が追加で必要になる。内視鏡で観察できる表出した血管を傷付けないことは可能だが、切除すべき腫瘍の内部にある血管は検出できない場合がある。そのため、視覚的に検出が難しい血管を検出する技術が求められている。
ある角度に達すると、柔/硬いずれの腫瘍モデルでも脈動を検知
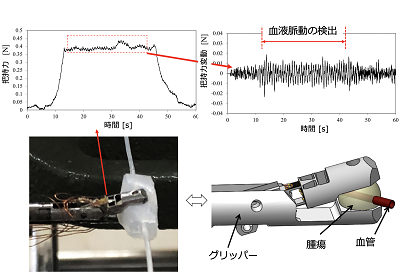
研究グループは、開発したグリッパーの性能を確かめるため、腫瘍を模したモデルを作成。柔らかい腫瘍として10%の食塩を混ぜ込んだウレタンゲルを、硬い腫瘍としてはシリコンゴムを用いて、それぞれ3×3×10ミリメートル(mm)の大きさで作成した。その中央に内径0.5mm、膜厚0.05mmのシリコンチューブを通して血管モデルとし、毎分70回の脈動を持つように水を流して動脈を模した。
直径3mmのプローブの先端に力覚センサーを取り付けた小さなグリッパーで腫瘍モデルを挟み、その角度を一定速度で狭めていくと、力覚センサーがある角度に達すると脈動を検知することがわかった。このグリッパーは、柔らかい腫瘍モデル、硬い腫瘍モデル共に脈動を検知したが、検知できる挟み角度は異なることが明らかとなった。
研究グループは、「今回開発された腫瘍内血管感知グリッパーを、現在広く普及している手術支援ロボットに装着、実際の手術現場での活用されることを目指し、今後はさまざまな条件下での実証を行っていく予定。将来的には、出血を防ぐ安全な脳腫瘍摘出ロボットの開発につながることが期待される」と、述べている。
▼関連リンク
・金沢大学 研究トピック