モーターと減速機によるロボット駆動の欠点を克服する関節モジュールを開発
新エネルギー・産業技術総合開発機構(NEDO)は1月9日、人間のやわらかな動きを再現できる関節モジュールを開発したと発表した。この研究は、NEDOが中央大学と共同で行ったもの。
画像はリリースより
少子高齢化や労働力不足といった社会課題への解決策として、街中や介護現場など人間に近いところで活躍するロボットが求められている。しかしながら、これまでのモーターと減速機によるロボット駆動は、大きな力で正確な動作が可能な反面、物体に衝突した際に停止できず、人間の近くで動作するには危険を伴うものだった。
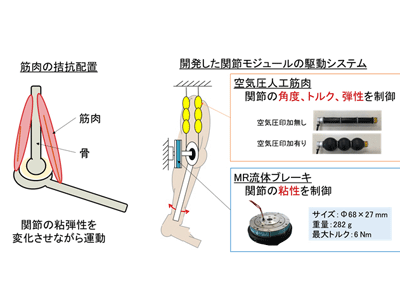
一方で、人間の関節は、構造的に柔軟かつ軽量な筋肉の拮抗配置により駆動されている。この構造によって、関節を曲げる力や角度だけでなく、関節の弾性(やわらかさ)や粘性(速度に対する反力、ダンパ要素)を変えられ、体が物体に当たった時でも関節が倣うように動き、衝撃を和らげることが可能となっている。
空気圧人工筋肉で関節の弾性を、MR流体ブレーキで粘性を変化させる
NEDOは、「次世代人工知能・ロボット中核技術開発」に取り組んでいる。今回、NEDOと中央大学が開発した関節モジュールは、空気圧人工筋肉と磁気粘性流体ブレーキ(MR流体ブレーキ)で駆動され、空気圧人工筋肉で関節の弾性(やわらかさ)を、MR流体ブレーキで粘性(速度に対する反力、ダンパ要素)を変化させることができる。これは、モーター駆動の装置が制御により弾性や粘性を変化させるのと異なり、ハードウェアそのものの特性を直接変化させる。こうした仕組みにより、人間の関節のように関節を曲げる力や角度だけでなく、粘弾性も変化させることができ、人との自然な接触や、安全な協働作業などが可能となるという。
また、空気圧人工筋肉やMR流体ブレーキを駆動するために必要な空気圧源と電源も関節モジュール内に配置することで、オフラインでの駆動が可能。さらに、空気圧人工筋肉が軽量であることや、空気圧源に従来のコンプレッサーではなく液化ガスを用いているため、4kgと軽量だ。
研究グループは、今後、今回の成果を身体装着型アシスト装具やリハビリ支援装置などへ適用することを目指すとしている。具体的には、今回の成果を、現在開発中の可変粘弾性下肢アシスト装具Airsistシリーズに適用するとともに、中央大学発のベンチャー企業である株式会社ソラリスを通じて事業化を行っていくとしている。なお、今回開発した関節モジュールは、2020年1月16日と17日に、新宿ルミネゼロで開催される「NEDO AI&ROBOT NEXT シンポジウム」で展示される予定となっている。
▼関連リンク
・新エネルギー・産業技術総合開発機構(NEDO) ニュース