人との親和性に影響を与える発話などの僅かな違和感
大阪大学は7月31日、人間らしい存在感や対話感を対話相手に与えるロボットを実現し、車輪移動機構を持つ子供型アンドロイド「ibuki(イブキ)」を開発したと発表した。この研究は、ERATO石黒共生ヒューマンロボットインタラクションプロジェクトの石黒浩研究総括(同大大学院基礎工学研究科教授、株式会社国際電気通信基礎技術研究所石黒浩特別研究所所長・ATRフェロー)、河原達也グループリーダー(京都大学大学院情報学研究科教授)らの研究グループによるもの。
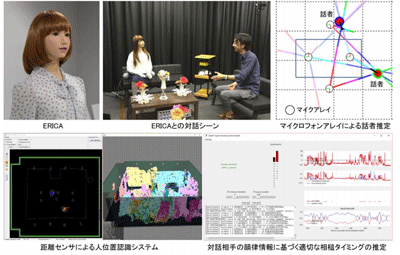
画像はリリースより
現在、さまざまなロボットが一般家庭などの日常生活の場で活動している。その中で、対話などの関わりを通して心理的にも人間をサポートするロボットに不可欠なヒューマンロボットインタラクション技術の確立が重要になってきている。
特に人間型ロボットであるアンドロイドは、その姿形から人間と親密に関わり「共生」するロボットとして期待されている。その一方で、対話中の人間型ロボットの振る舞いや発話における僅かな違和感が、人間との親和性に大きな影響を与えている。この違和感を解消するためには、音声認識、発話生成、反応動作、ロボットの見た目の人間らしさなど、個々の要素技術の洗練が必要不可欠であるとともに、これらの要素技術を統合する研究開発が必要である。
移動機構を持つ子供型アンドロイド「ibuki」も開発
研究グループは、限定された状況や目的に限られるものの、日常的な場面において人間らしい存在感を感じさせる、アンドロイドのための対話システムを開発。距離センサー(人の位置や頭部動作の認識)、カメラ(人の表情の認識)、マイクロフォンアレイ(発話者の位置や音声の認識)など、多様なセンサーを用いるマルチモーダル認識システムを構築した。また、意図や欲求に基づく発話、動作、視線や感情を制御することで、人間らしい存在感を感じさせる対話制御システムを開発し、既存成果であるアンドロイド「ERICA(エリカ)」との対話環境を構築した。
さらに、移動機構を持つ子供型アンドロイド「ibuki(イブキ)」も開発。ibukiは車輪型の移動機構に加え、偏心した車輪と直動機構の組み合わせによる全身の揺動機構と、上半身を駆動する腰関節を持ち、人間の歩行と同様の躍動感を表現。さらに、表情を表出するために必要な顔や頭部の駆動機構だけでなく、ジェスチャーを生成するための手や腕にも多数の駆動関節を実装したという。全ての自由度がバックドライバビリティのある減速機付電気モーターで駆動されるため、移動には適さなかった空気圧システムのためのエアーコンプレッサーが不要になった。これにより、オフィスビルでの道案内や店舗での商品説明など、人間と共に移動したり、互いの位置関係を調整したりしながら、身体的なインタラクションを行うことが可能となったとしている。
▼関連リンク
・大阪大学 研究情報