先端把持部にMEMS 6軸力センサを実装した内視鏡手術用把持鉗子を開発
東京大学は1月23日、先端把持部にMEMS(微小電気機械システム) 6軸力センサを実装した内視鏡手術用把持鉗子を用いて、柔軟材料中に埋め込まれた硬質物質のサイズと把持位置に対する位置関係を算出する手法の開発に成功したと発表した。この研究は、同大学大学院情報理工学系研究科の下山勲教授および中井亮仁特任助教らが、東京電機大学工学部の土肥健純教授および桑名健太助教らと協働して行ったもの。
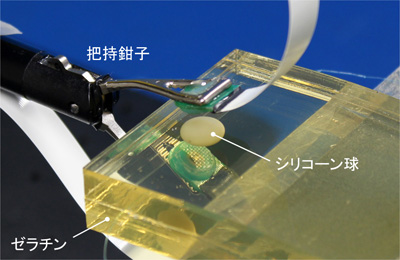
画像はリリースより
低侵襲な内視鏡手術では、術者が患部に直接触れて触診することが難しいことから、手術前のCTスキャンによって腫瘍のサイズと位置情報を得ることが一般的に行われている。しかし、肺がん摘出手術においては術前に肺内の空気を抜いて萎んだ状態にするため、CTスキャンで得られた腫瘍の位置情報のみから手術中の正確な位置を把握することは難しい。そのため、手術中の萎んだ状態の肺に対して腫瘍の正確な位置情報を得ることが、現状の課題となっている。
そこで研究グループは、先端把持部にMEMS 6軸力センサを実装した内視鏡手術用把持鉗子を開発。MEMS 6軸力センサは、これまで東京大学下山研究室で培ってきたピエゾ抵抗型センサ技術を結集したもので、センサの心臓部ともいえるMEMSセンサチップのサイズはわずか1.25mm角と非常に小さい。これをシリコーンゴムの内部に埋め込んだMEMS 6軸力センサは、センサ表面に垂直な圧縮力と、センサ表面と平行で互いに直交する向きの2軸のせん断力、さらに互いに直交する3軸周りのモーメントを計測することが可能。シリコーンゴムのサイズは直径10mm、厚さ2mmと小さいうえに薄く、市販の内視鏡手術用把持鉗子の先端把持部に実装するのに問題ない大きさだという。
手術中に位置把握が困難な肺がんの内視鏡下摘出手術への応用に期待
開発したセンサ付き把持鉗子の有効性を示すために、シリコーン球を内部に埋め込んだゼラチンをセンサ付き鉗子で把持する実験を実施。シリコーン球とゼラチンは腫瘍と臓器を想定したもので、その硬さはそれぞれ肺がんと肺臓を模擬している。直径10mmのシリコーン球は15mm厚のゼラチンに、厚さ方向の中心、手前側端面から10mmの位置に埋め込んだ。この模擬モデルに対して、開発したセンサ付き鉗子を用いてゼラチンを手前側から把持し、把持位置を-15mmから15mmの位置まで1mm刻みで動かした。2つの先端把持部の間隔は鉗子の軸に実装されたポテンショメータで計測し、この間隔が特定の値となるよう把持を行った。把持位置による3軸力と3軸トルクの値の変化を測定したところ、把持鉗子がシリコーン球に近付くに従って垂直力Fzが大きくなり、中心でピークとなることがわかった。
一方でモーメントMyもシリコーン球に近付くに従って大きくなったが、中心付近でゼロに近付き、中心を過ぎた後は値の正負が逆転することもわかった。これらの結果から、シリコーン球近傍を把持したときのモーメントの出力によって、ゼラチンに埋め込まれたシリコーン球の方向を推測できることが示唆されるとともに、垂直力Fzのデータを用いて埋め込まれたシリコーン球の直径を精度良く推測できることもわかったとしている。
同手法により算出した腫瘍サイズとCTスキャンで得られた腫瘍サイズとを比較すれば腫瘍の同定ができるため、手術中に術者が腫瘍の正確な位置を把握することが可能になると、研究グループは述べている。
▼関連リンク
・東京大学 プレスリリース