脳卒中患者の歩行制御には個別性がある?
畿央大学は9月25日、ネットワーク分析を用いた因果探索を行い、日常生活環境における歩行の時空間的パラメータ間の因果関係を明らかにするとともに、その因果関係に3つのパターンがあることを明らかにしたと発表した。この研究は、同大ニューロリハビリテーション研究センターおよび 長崎大学生命医科学域(保健学系)の西祐樹氏らの研究グループによるもの。研究成果は、「IEEE transactions on neural systems and rehabilitation engineering」に掲載されている。
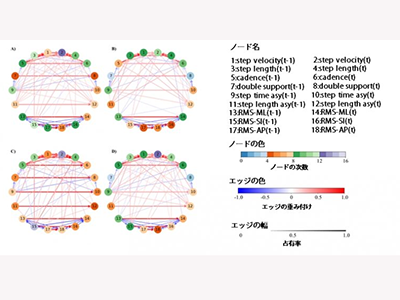
画像はリリースより
(詳細は▼関連リンクからご確認ください)
脳卒中患者の多くは歩行速度の低下や歩行不安定性・非対称性の増大等を特徴とした歩行障害を呈し、転倒リスクや生活範囲の狭小化、生活の質の低下を引き起こす。特に日常生活環境においては、さまざまな文脈や環境に応じた歩行速度の調整等の歩行制御が求められる。近年、慣性センサー技術の進歩により、日常生活における歩行制御が明らかになってきた。一方、これまでの手法では、歩行の時空間パラメータを距離や時間の平均値として扱っており、歩行の連続性や歩行制御の変化を十分に捉えきれていなかった。また、上記の歩行パラメータは相互に関係しており、従来の歩行制御モデルでは、脳卒中患者の歩行速度は主に歩調によって決定されるが、歩幅や歩行非対称性が歩行速度に与える影響には一貫性はなかった。つまり、脳卒中の歩行制御には個別性があることが推測される。脳卒中患者個々の歩行制御モデルの構築と類型化は歩行機能の相互作用への洞察を深め、個別化されたリハビリテーション戦略に貢献することが期待される。
歩行制御モデルは3クラスターに類型化、歩幅速度の調整能などで説明可能
今回の研究目的は、脳卒中患者の日常生活環境における個別の歩行制御モデルを構築し、類型化することだ。脳卒中患者を対象に腰部に加速度計を装着し、日常生活環境において24時間計測した。計測された加速度データから歩行の時空間変数を算出し、Linear Non-Gaussian Acyclic Model(LiNGAM)を使用して歩行の連続性を考慮した時系列的因果探索を行い、各患者における有向非巡回グラフ(DAG)を作成した。次にスペクトルクラスタリングを使用して各患者のDAGを類型化した。最後に、類型化されたDAGの特徴を分析するために、ベイズロジスティック回帰に基づいた特徴選択を行った。
同研究における脳卒中患者の歩行制御モデルは、「クラスター1:歩行の非対称性と歩行の不安定性が高く、主にケイデンスに基づいて歩行速度を調整する中等度の脳卒中患者」「クラスター2:主に歩幅に基づいて歩行速度を調整する軽度の脳卒中患者」「クラスター3:主に歩幅とケイデンスの両方に基づいて歩行速度を調整する軽度の脳卒中患者」に類型化された。これらの3つのクラスターは、歩幅速度の調整能、Fugl-Meyer assessment、歩幅の非対称性、歩幅という4つの変数に基づいて正確に分類できた。これらの脳卒中患者における歩行制御モデルのパターンは、歩行制御の異質性と脳卒中患者の機能的多様性を示唆している。
特定の歩行障害をターゲットとし、正確な介入開発に期待
脳卒中患者における特徴的な歩行障害間の相互作用を理解し、異質性を明らかにすることは、個別性の高い精密リハビリテーションの基礎となる。歩行制御の個々のネットワークを解読することで、歩行速度の向上などの望ましい機能改善に関連する歩幅や歩行の非対称性などの特定の歩行障害をターゲットにした、正確な介入を開発できるとしている。このアプローチにより、よりオーダーメイドで効果的な治療戦略が期待される、と研究グループは述べている。
▼関連リンク
・畿央大学 プレスリリース