「回復の谷」の背景に潜む数理メカニズムは?
筑波大学は12月21日、リハビリにおけるタスク成功率の低下現象「回復の谷」の背景にある数理メカニズムを明らかにしたと発表した。この研究は、同大システム情報系 井澤淳准教授らの研究グループによるもの。研究成果は、「Frontiers in Rehabilitation Sciences」に掲載されている。
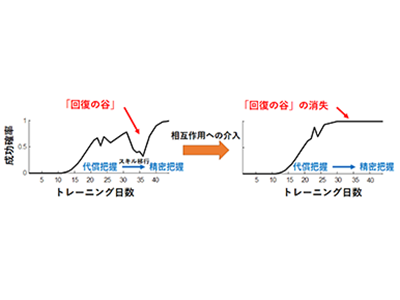
画像はリリースより
(詳細は▼関連リンクからご確認ください)
リハビリテーション用アシストロボットが販売され始めてからしばらく経つが、実際の治療成績の向上にまで結びついていないのが現状だ。研究グループは、リハビリテーション用アシストロボットに不足しているのは機械としてのロボットの開発研究ではなく、「機能回復の数理モデルに基づいた設計論」だと考えた。
脳卒中のリハビリテーションで特に問題となるのが「学習性不使用」と呼ばれる現象だ。例えば、利き手である右手が麻痺している場合、患者は左手を使うことで機能を代償する傾向がある。そうすると、麻痺手である右手の使用機会が減り、使用頻度に応じた麻痺手の回復が見込めなくなる。このような状態になると、麻痺手(右)を使って達成可能なタスクであっても、非麻痺手(左)を使うようになる。本来であれば麻痺手(右)の回復のために使われるはずだった神経リソースも非麻痺手(左)が奪うことになり、さらに麻痺手(右)が使われるという負のスパイラルに陥る。従来のリハビリテーションでは、非麻痺手の使用をミトンやスリングで物理的に固定するCI療法(Constraint-Induced movement therapy)が効果を上げてきた。しかし、患者に身体的負担やストレスを強いるため、リハビリテーションロボットを用いたより効率的な療法の開発が期待されている。
研究グループは、このような学習性不使用を解決するためのリハビリテーション用ロボット開発の設計論のヒントを、理学療法学の権威であるジェームズ・ゴードン博士(南カリフォルニア大学)が指摘した、リハビリテーション中のスキルの移行に伴う成功確率の落ち込み現象に求めた。そして、このような落ち込み現象を「回復の谷」と名付け、その背景にある数理メカニズムを明らかにすることを目的に研究を行った。
脳卒中サルでスキルレベルの回復をモデル化、最も回復を説明する要素の組み合わせを解析
「回復の谷」は療法士の間で経験的に認識されているが、臨床実験データとして明確に報告されてはいない。しかし、サルやマウスの脳卒中モデルによる実験例においては「回復の谷」がエサの獲得確率の落ち込みデータとして明確に示されている。
今回の研究では、サルの脳卒中モデルが麻痺した手でエサをつかむ運動スキルを回復する際、どのようなつかみ方をしたのかと成功率のデータを解析した。サルは、トレーニングの初期には親指の背中の部分と人差し指の間にエサを挟み込むようなつかみ方(代償的把握)を選択することで比較的早くタスク成功率を上昇させるが、本来使用していた親指と人差し指を対立させるつかみ方(精密把握)を選択し始めるとタスク成功率が大きく下降する「回復の谷」を示す。しかし、その後のトレーニングによって「回復の谷」を克服し、精密把握の成功率を上昇させることができる。
「回復の谷」の克服の背景にあるメカニズムを明らかにするため、それぞれの把握スキルのレベルがスキルの使用によって更新すること(使用依存的可塑性:Use Dependent Plasticity)を表現した状態空間モデルによってモデル化した。さらに、日数の経過とともにスキルレベルが自発的に回復する要素(自発的回復:Spontaneous Recovery)も加え、これら要素の組み合わせのうち、どの組み合わせが最も回復過程を説明するか情報量基準を用いて比較した。
感覚経験への介入や相互作用項の強化を応用することで、回復の谷を克服できる可能性
その結果、代償把握と精密把握のそれぞれの使用依存的可塑性に加え、一方の使用が他方に影響を与えるような相互作用項と、さらに自発的回復を組み合わせた状態空間モデルが最も良く計測データを説明できることを確認した。さらに、それぞれの定数に外乱を加えて、その影響をシミュレーションする感度解析によって、相互作用を高めると回復の谷を比較的容易に克服できることを明らかにした。
同結果は、アシストロボットによる感覚経験への介入や非侵襲神経モジュレーションを用いた相互作用項の強化をリハビリテーションに応用することによって「回復の谷」の克服を補助し、代償把握と精密把握の間の移行を促進させる可能性を示唆している。
数理モデルを用いることで「テイラーメイド・リハビリテーション」が可能に
今回のように数理モデルを用いることで、どのような要因に対してどのタイミングで介入すればどのような効果が期待できるかに関して、数値シミュレーションを用いたリハビリテーションの設計ができるようになり、個々の回復特性に合わせたテイラーメイド・リハビリテーションが可能になると考えられる。
「今後は数理モデルに基づいた設計論を確立し、計算論的神経リハビリテーション工学という新しい工学領域を開拓することを目標としている。少子高齢化社会における健康寿命の延伸には神経リハビリテーション科学の推進が重要だ。本理論をロボットインターフェイスやVR技術と統合し、効果的なリハビリテーション技術の開発へと展開する予定だ」と、研究グループは述べている。
▼関連リンク
・筑波大学 TSUKUBA JOURNAL