人とデバイスとの「ソーシャルタッチ」による痛み・恐怖軽減効果は?
筑波大学は10月14日、ヒトの痛みや恐怖を和らげるウェアラブルロボットを開発したと発表した。この研究は、同大システム情報系 知能機能工学域の田中文英准教授らの研究グループによるもの。研究成果は、「Scientific Reports」に掲載されている。
画像はリリースより
(詳細は▼関連リンクからご確認ください)
大きな痛みが予想される医療処置中においては麻酔が用いられるが、注射など、そこまで大きな痛みではない場合には麻酔が用いられない。介護や看護などの現場では、そのような人たちの痛みや不安を和らげるために、腕や背中をなでたり、さすったりするということを行っている。
このような「人同士の触れ合い」は、ソーシャルタッチやインターパーソナルタッチと呼ばれ、幅広い分野で効果に関する研究が行われている。近年では人同士だけでなく、人とデバイス(ロボットなど)の間のソーシャルタッチを実現するための要素技術やその効果なども研究され始めている。
「握る」感覚と「握られる」感覚を同時に提示可能
研究グループは現在、ユーザーが簡単に手にはめて握ることにより、痛みや恐怖を和らげることが可能なウェアラブルロボットの開発を進めている。今回、開発したプロトタイプ(コードネーム:Reliebo)を用いて、初めてその効果を定量的に確認した。
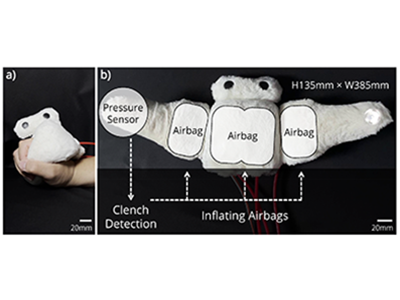
同プロトタイプは、大人の握りこぶし大のサイズで、柔らかな毛皮で覆われた外装をしている。頭部があり、ユーザーとアイコンタクトするように首の向きをひねって調整することが可能(現在のプロトタイプでは自動ではないが、将来的には自動にする予定)。胴体には3つの小型エアバッグが内蔵されており、外付けのポンプで空気圧を制御し、各々を自在に膨張収縮させることができる。
また、ユーザーの握り動作を検出する圧力センサも内蔵されている。例えば、ユーザーが手にはめて握った際に、手の甲側および側面のエアバッグを膨張させ、ユーザーに「(外から大きな手で)握られている」感覚を与えることが可能になる。このように、「握る」感覚と「握られる」感覚を同時に提示できるところに、技術的な新規性があるとしている。
プロトタイプの有効性を検証するため、痛みの評価や唾液分析などを実施
研究グループは、開発したプロトタイプの有効性を検証するため、総計70人を超える大学生と大学院生を対象に実験を行った。
実験では、痛み研究分野において確立された手法である「熱刺激装置」を用いた実験プロトコルを用いた。また、痛みの評価には「PAS(Pain Assessment Scale)」と呼ばれる指標に沿った口頭聴取に加え、実験中に参加者から採取する唾液を用いた分析を用いた。さらには、参加者の「不安度合」や「注射に対する恐怖心」などを尋ねるアンケートも併せて行った。
ロボットの着用で痛み値が有意に減少、注射に対する恐怖心も低下
唾液採取時の手順が不完全だったサンプルを除外した66人の実験参加者から得られた結果データを分析した結果、実験参加者がロボットを着用していた条件では、着用していなかった場合と比較して、PAS尺度に基づく口頭聴取の痛み値が有意に減少していたことが判明した。
さらに、唾液分析の結果からは、ロボット着用条件の中でも、特にロボットがユーザーの握りに反応して握り返し動作を行った条件において、唾液中のオキシトシンレベルが減少する傾向(p=0.051)が示された。オキシトシンは、人のストレスレベル減少に沿ってそのレベルが減少することが先行研究で報告されている。その他、8種類の具体的注射体験(採血、歯科治療時の麻酔、ワクチン接種、など)についてのアンケート結果から、同実験参加後に、参加者の注射に対する恐怖心が有意に低下したことも明らかになった。
ロボットとVR/ARとの融合で、より広い場面・用途で痛みと不安の軽減可能な手法開発目指す
研究グループは、ユーザーの痛みや不安をさらに効果的に和らげるロボットのデザインや機能に関する研究を進めていくとともに、こうしたロボットと仮想現実(VR)/拡張現実(AR)など仮想世界上の介入手法とを融合させることによって、より広い場面や用途においてユーザーの痛みや不安を和らげることができる手法の研究開発も進めていくとしている。
▼関連リンク
・筑波大学 TSUKUBA JOURNAL